Uncategorized
Linden School Visits Hacklab
by Christopher Olah on Feb.13, 2013, under Uncategorized
Two weeks ago hacklab was able to host students from the Linden School, a local all-girls school.

Soldering blinkies
It was super awesome. They:
- designed 3D objects in class, which we 3D printed for them in advance
- soldered simple blinkies
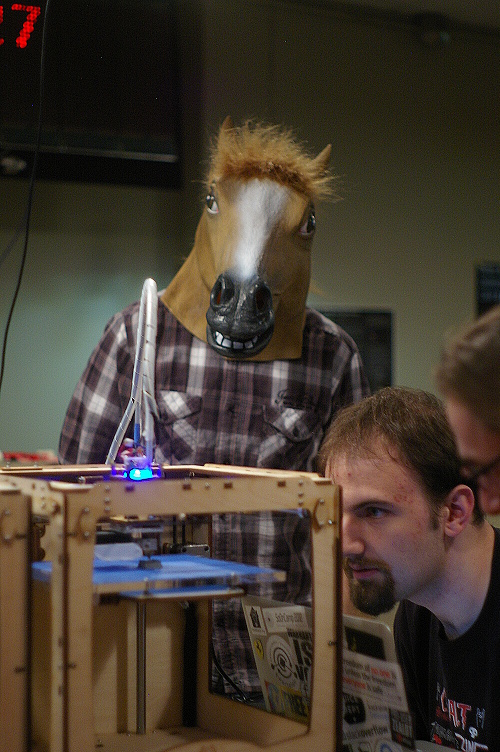
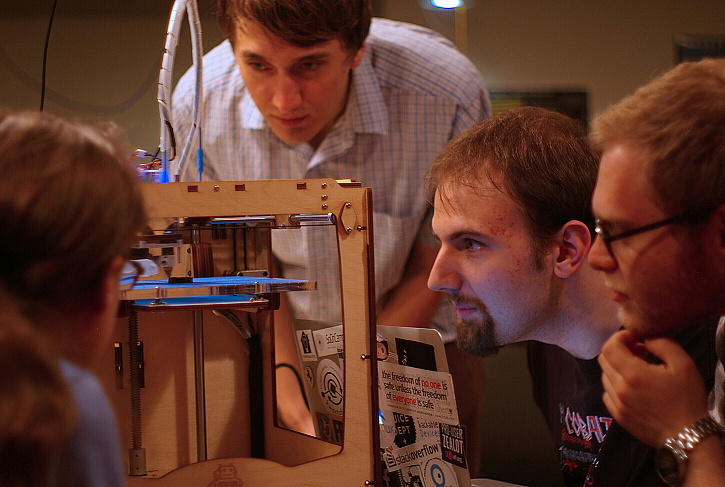
- saw 3D printers in action
- saw hacklab’s different tools
- learned how to pick locks (some)
- used hacklab’s laser cutter (some)
Afterwards, some of the students described us as the best field trip they’ve ever gone on. More pictures follow!
Automata, or things that go put put.
by Adam Evenden on Sep.18, 2012, under Projects, Uncategorized

Trainoverlord on the test track.
This weeks post is of projects that have come threw the space or live in the space that move, fly, or simply put have motors and are really neat. Click more for the 9 photos of Trainoverlord, a Quadrocopter, Line following robot, and a sick 6 legged robot I am calling Mr.Roboto.
From Digital Design to Physical
by Adam Evenden on Sep.03, 2012, under Projects, Uncategorized

Assembly in Progress.
Something a tad different.
by Adam Evenden on Sep.03, 2012, under Uncategorized
This weeks post is starting with a bang, quite literately. Or is it a boom?
Starting things with a bang. The pyrotechnic device shown is used to create a waterfall effect. A number of such device was used at the opening ceremony's of the Olympic games .
This weeks post is a little bit more wordy then weeks of the past, due to making up for missing a week and providing a glimpse into what the author gets up to, as well as how last weeks adventures relate to what I do at the lab and a bit of a geek out. Last weeks post was missed due to being in London, Ontario, volunteering at the annual CITT trade show and conference. CITT stands for the Canadian Institute of Theatre Technology, its primary purpose is to link industry and individuals together so that effective communication can happen, as well as create closer ties to those within the theatre community to industry.
CITT does this via workshops, classes, tours, certification, open forums, AGM, and providing a venue annually that moves across the country so that over time each province will host the event. Last year CITT annual conference was in Victoria, BC. This year it was in London, Ont. Next year it will be in Calgary Alberta. With that said, I care to get to my point that the theatre industry is full of creative individuals. Not only artistic but electronic and electrically savvy who are alternative thinkers.
I am a theatrical technician, an artisan, an artist, a geek, as well as have been known for being a muse, and a bit nerdy. Some are surprised that an individual so heavily in the arts would be so interested in hacking, and making. But in reality these things go hand in hand. Many effects and sets that support a theatrical production take months and if there are special allowances years to design or gain the skills to be able to effectively execute safely and realistically.
The Building of train overloads new brain.
by Adam Evenden on Aug.01, 2012, under Projects, Uncategorized

The Building of train overloads new brain. The PCB that Atrain is assembling in the GIF is a condensing of a stack of Arduino breakout boards and the Arduino that currently operate our metallic master.
I <3 Hacking.
by Adam Evenden on Jul.28, 2012, under Uncategorized
Hack Lab after hours.
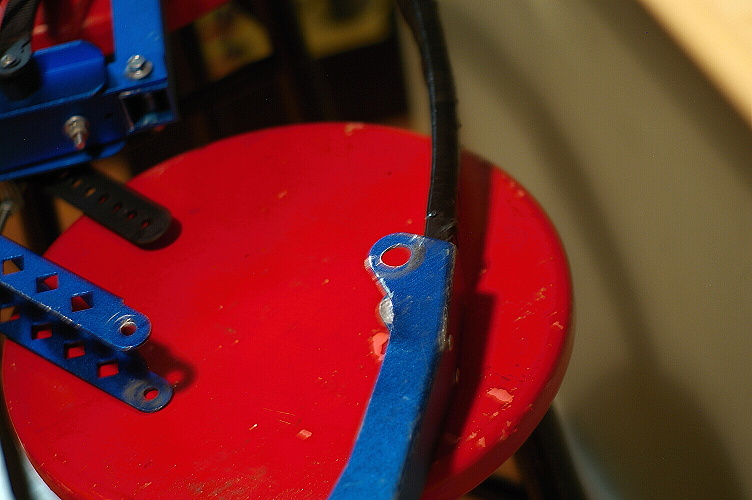
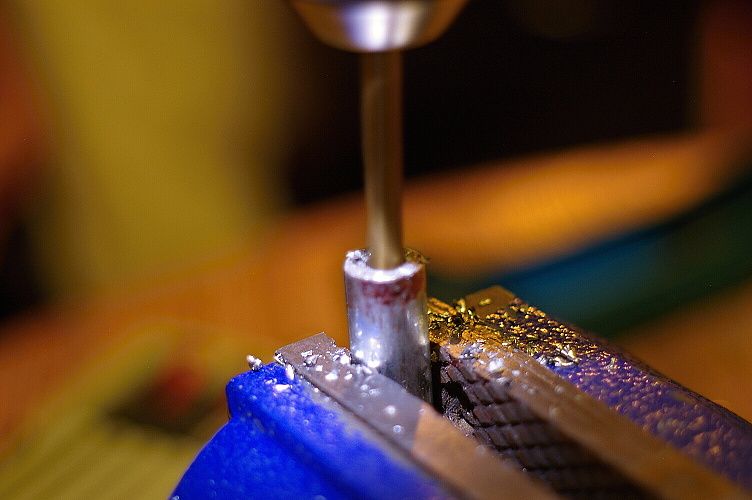
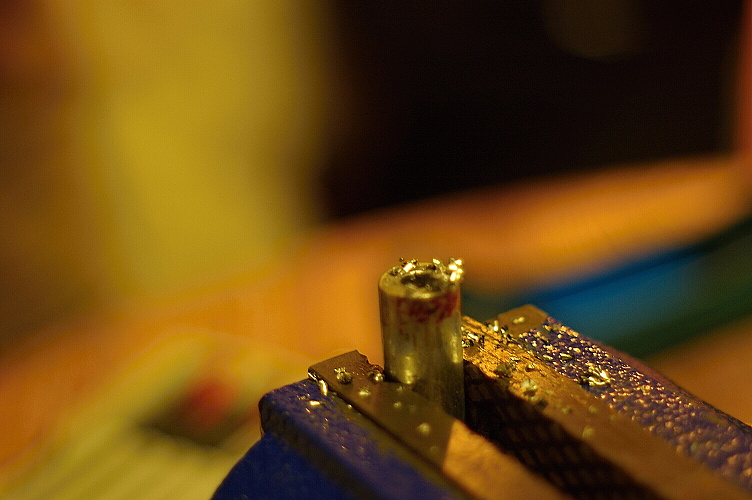
Spring in ones step.
by Adam Evenden on Jul.26, 2012, under Projects, Uncategorized
Last week one of Hack Labs members finished some much needed repairs to his stilts. The stilts specifically needed a spacer/pivot, to be built to repair the joint. Not everyone made it down stairs to watch him try out the fruits of his labour so here is a GIF to show what many missed.


- Jumping in joy for the repairs are done. Then taking them for a spin.
Build Photos of the replacement joint.






Snake: Mastering the Joystick.
by Adam Evenden on Jul.17, 2012, under Projects, Uncategorized
Geordie rendition of the classic game of Snake as a GIF.
This weeks Hacklab Photo Round up in: 10 photos – Week of (July 8-14).
by Adam Evenden on Jul.14, 2012, under Events, Projects, Uncategorized
Every week for as many as I can I hope to post a collection of Images that depict what the space is all about. It may not be 10 photos each week it maybe more it may be less, but each photo is part of hack labs story.
Here is HackLab as I have glimpsed it this week.

1 - Community Service: The growing pile of E-Waste that community members have brought in for others to pick threw before being picked up by E-Waste disposal.

2 - Exploration: In a basement of a building in the market is a treasure trove of discovery to be found.
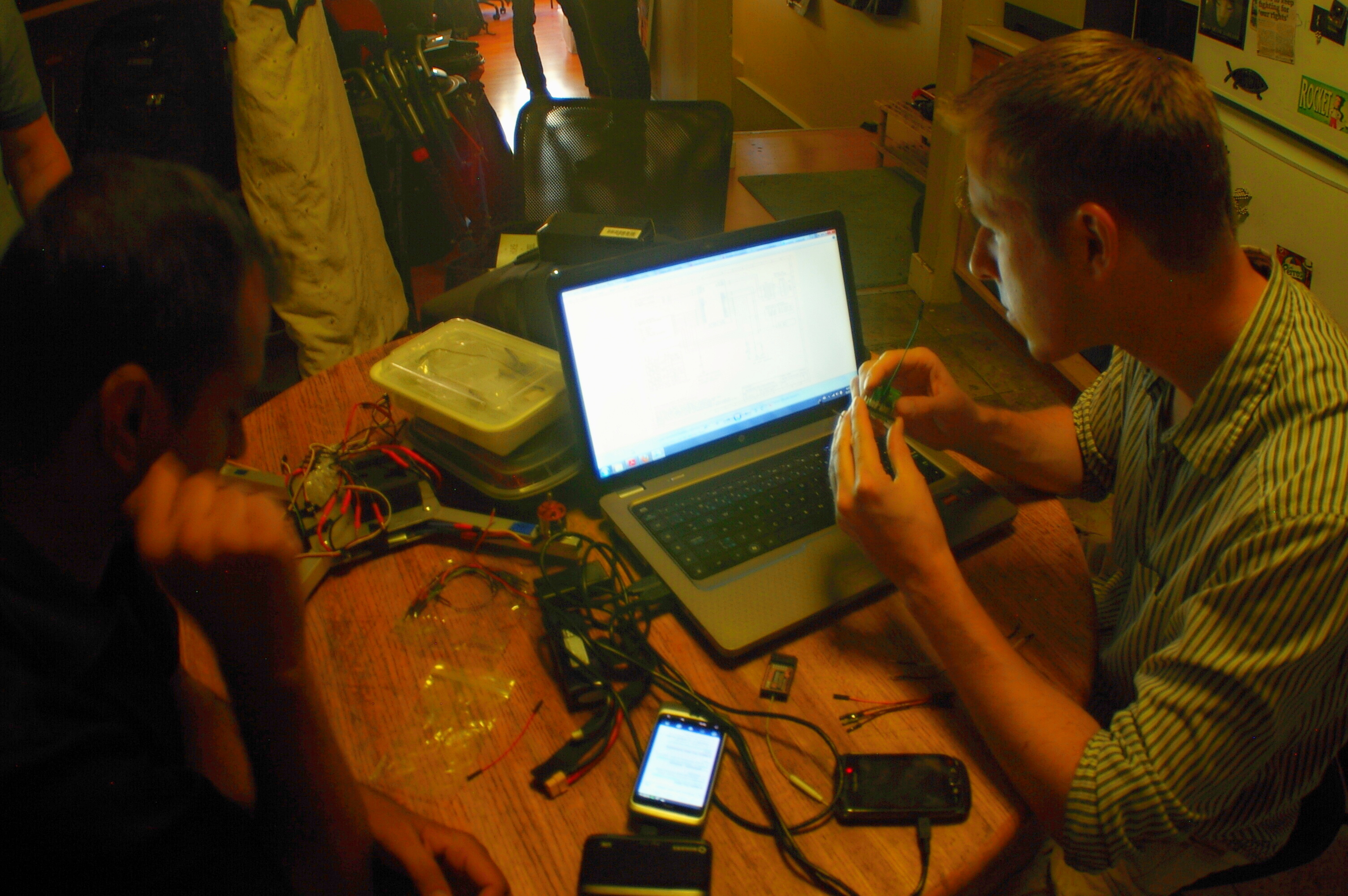
3 - Collaboration: Hard work and dedication to a project, can create wonderful things. The two individuals in this photo are working on a Quadrocopter .

4 - Craftsmanship: Taking time to ensure everything is correct.

5 - Creativity: Measuring carefully to realize an idea.
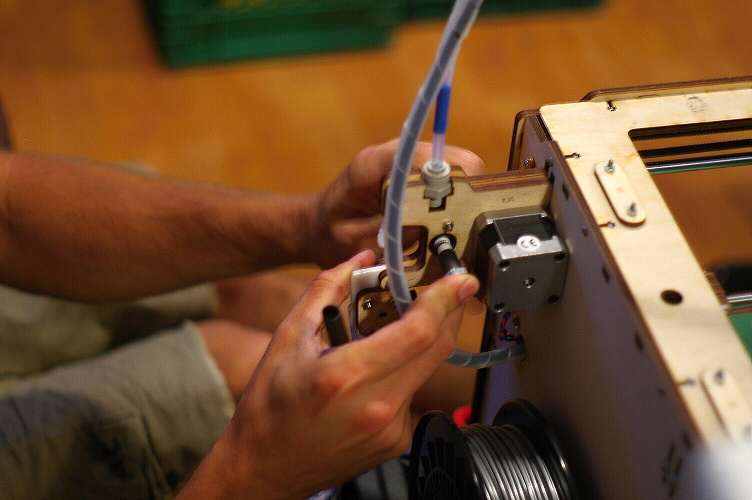
6 - Solutions: Problem solving is something I encounter often in the space, people come in with ideas and collaboration happens. It is not often I get to witness a solution executed so quickly. This instants part of the Ultimaker needed trouble shooting and a custom part was fabricated and installed.
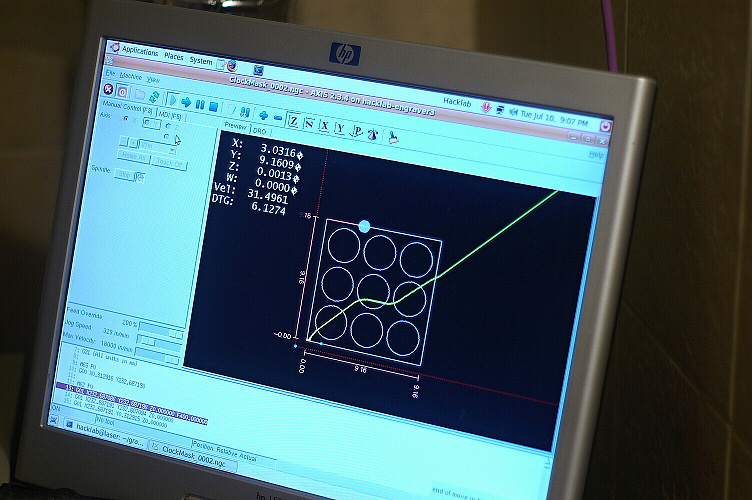
7 - Lasers: Always a cool thing, and in this case a laser cutter hard at work cutting out a Façade for a project.
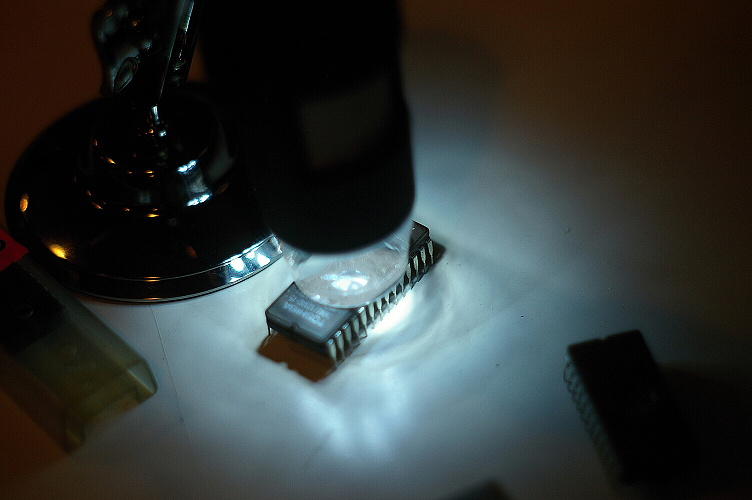
8 - Curiosity: Getting ready to examine a EPROM with a USB Microscope.
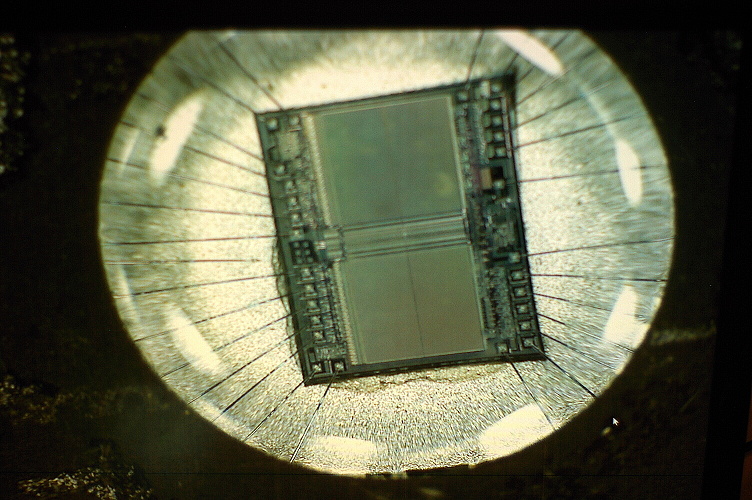
9 - Fascination: Exploring the depths of a EPROM with the USB Microscope.

10 - Easter Eggs: Looking for those little surprises or unexpected discovery's. In this case we found the company's logo amongst the circuitry.
Photo Journalist in Residence Introduction & Updates.
by Adam Evenden on Jul.09, 2012, under Announcements, Projects, Uncategorized
I care to introduce myself, my name is Adam Evenden. Over the last few weeks I have slowly been moving into my new role as the Photo Journalist in Residence, at the HackLab.
Tuesday have been a magical time at the HackLab for me over the last 2 years that I have spent visiting the Lab. Having met many interesting individuals, heard many great ideas, seen many grand projects, and have always been excited to come back. I foresee meeting many new members in the future who I have not had the previous pleasure of meeting, and the enjoyment I have experienced in the lab so far extending into my new role as the Photo Journalist in Residence.
Over the recent years the lab I have had the opportunity to witness many entertaining moments at the hack lab, as well as triumphant progress within projects. I would like to share within my first post some of the moments I have captured at the hack lab over the last few weeks as the Photo Journalist in Residence, as well as some moments that I have captured while visiting Iceland’s hacker space Hakkavélin.
After all the spontaneity was done, Geordie, Atrain, Will, And Jed set to work on the Ultimaker. After much tweaking, fine tuning, and many hours spent working on the Ultimaker. We did not get out of the Lab till after 7am that night, and the time was well spent.
Successful Test Objected printed